Animesh Garg
@animesh_garg
21,109
Followers
1,025
Following
462
Media
1,955
Statuses
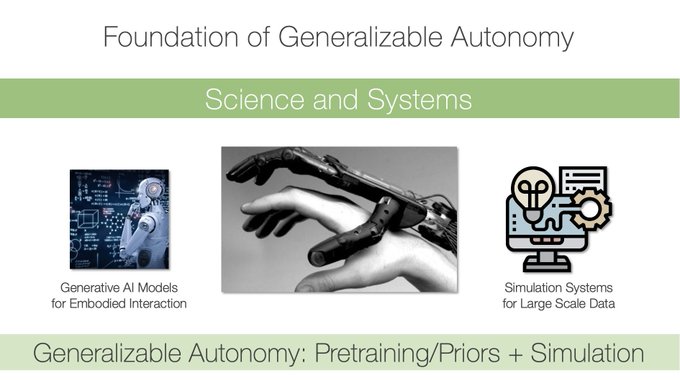
Foundation Models for Generalizable Autonomy. Assistant Professor in AI Robotics @GeorgiaTech + @NvidiaAI . prev @Stanford @berkeley_ai @UofTCompSci
Don't wanna be here?
Send us removal request.