Eric Brachmann
@eric_brachmann
3,889
Followers
594
Following
286
Media
1,684
Statuses
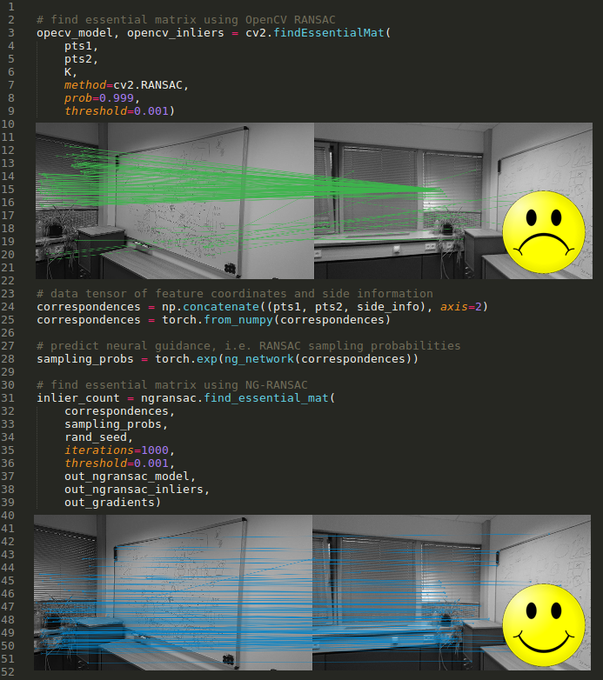
Staff Scientist @NianticLabs . Throws #MachineLearning at traditional #ComputerVision pipelines to see what sticks. Differentiates the non-differentiable.
Don't wanna be here?
Send us removal request.