Ryohei Sasaki
@rsasaki0109
5,233
Followers
150
Following
1,189
Media
1,622
Statuses
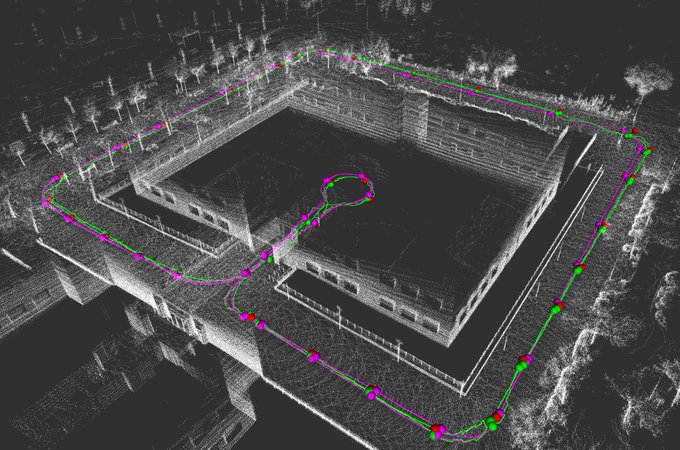
Localization and mapping engineer at MAP IV (TIER IV Group)←Waseda University GNSS/LiDAR/IMU/SLAM/Autonomous Mobile Robotics/Autonomous Driving
Don't wanna be here?
Send us removal request.